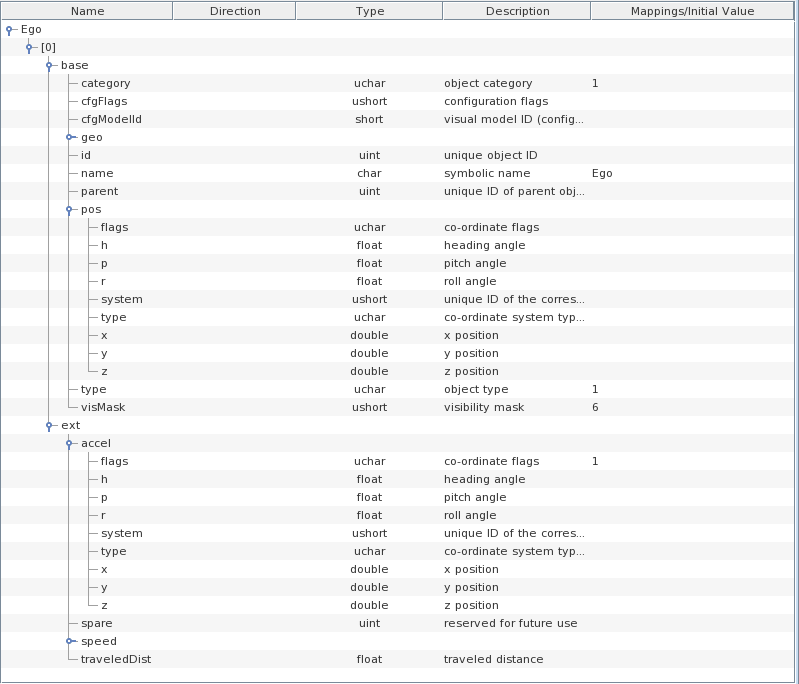
| Ego.[0].base.id: | unique object ID |
| Ego.[0].base.category: | uchar", "object category |
| Ego.[0].base.type: | uchar", "object type |
| Ego.[0].base.visMask: | visibility mask |
| Ego.[0].base.name: | char", "symbolic name |
| Ego.[0].base.geo.dimX: | x dimension in object co-ordinates (length) |
| Ego.[0].base.geo.dimY: | y dimension in object co-ordinates (width) |
| Ego.[0].base.geo.dimZ: | z dimension in object co-ordinates (height) |
| Ego.[0].base.geo.offX: | x distance from ref. point to center of geometry, object co-ordinate system |
| Ego.[0].base.geo.offY: | y distance from ref. point to center of geometry, object co-ordinate system |
| Ego.[0].base.geo.offZ: | z distance from ref. point to center of geometry, object co-ordinate system |
| Ego.[0].base.pos.x: | double", "x position |
| Ego.[0].base.pos.y: | double", "y position |
| Ego.[0].base.pos.z: | double", "z position |
| Ego.[0].base.pos.h: | heading angle |
| Ego.[0].base.pos.p: | pitch angle |
| Ego.[0].base.pos.r: | roll angle |
| Ego.[0].base.pos.flags: | uchar", "co-ordinate flags |
| Ego.[0].base.pos.type: | uchar", "co-ordinate system type identifier |
| Ego.[0].base.pos.system: | unique ID of the corresponding (user) co-ordinate system |
| Ego.[0].base.parent: | unique ID of parent object |
| Ego.[0].base.cfgFlags: | configuration flags |
| Ego.[0].base.cfgModelId: | visual model ID (configuration parameter) |
| Ego.[0].ext.speed.x: | double", "x position |
| Ego.[0].ext.speed.y: | double", "y position |
| Ego.[0].ext.speed.z: | double", "z position |
| Ego.[0].ext.speed.h: | heading angle |
| Ego.[0].ext.speed.p: | pitch angle |
| Ego.[0].ext.speed.r: | roll angle |
| Ego.[0].ext.speed.flags: | uchar", "co-ordinate flags |
| Ego.[0].ext.speed.type: | uchar", "co-ordinate system type identifier |
| Ego.[0].ext.speed.system: | unique ID of the corresponding (user) co-ordinate system |
| Ego.[0].ext.accel.x: | double", "x position |
| Ego.[0].ext.accel.y: | double", "y position |
| Ego.[0].ext.accel.z: | double", "z position |
| Ego.[0].ext.accel.h: | heading angle |
| Ego.[0].ext.accel.p: | pitch angle |
| Ego.[0].ext.accel.r: | roll angle |
| Ego.[0].ext.accel.flags: | uchar", "co-ordinate flags |
| Ego.[0].ext.accel.type: | uchar", "co-ordinate system type identifier |
| Ego.[0].ext.accel.system: | unique ID of the corresponding (user) co-ordinate system |
| Ego.[0].ext.traveledDist: | traveled distance |
| Ego.[0].ext.spare: | reserved for future use |