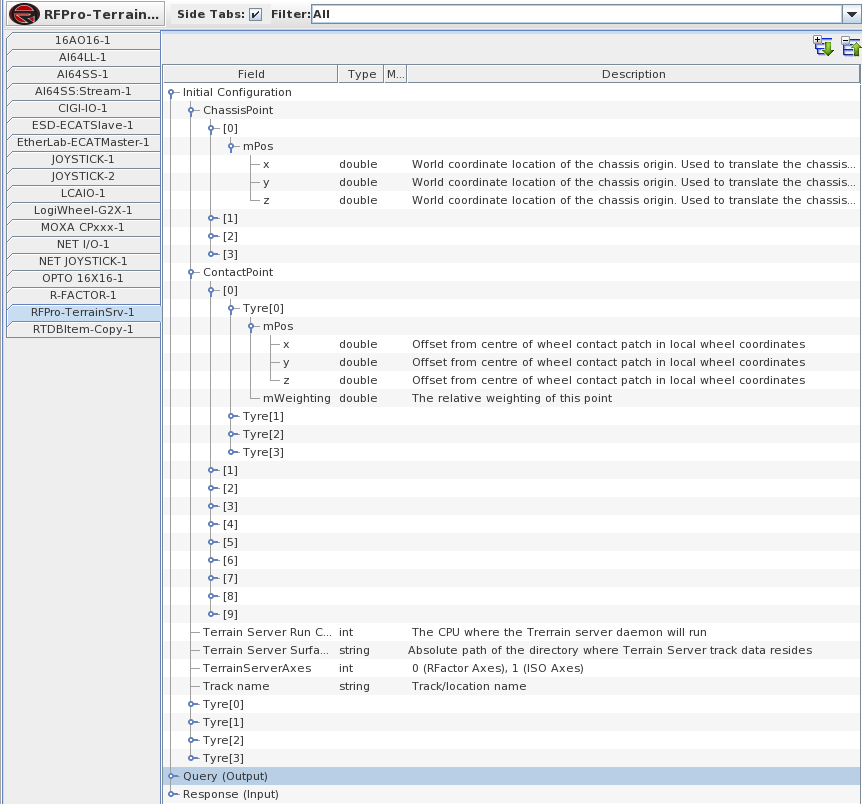
This section provides the values to initialize the Terrain Server configuration. The initial values can be entered as constants in the mapped Points|Initial value column (by double-clicking the field on this column) or will
be provided the RTDB item initial value when the parameter is mapped to an RTDB item. The RTDB item initial value is provided by the default value in the item configuration panel or by associated initial
condition value set specified when running the test.
- ChassisPoint.[n]:
Define the position of the chassis point. A maximum of 25 points can be configured.
- ContactPoint.[n]:
Define the position of the tires contact point. This is optional, a default position of (0,0,0) with a weighting of 1 is assumed if not provided, a maximum of 10 contact points with associated weighting can be configured.
- Terrain Server Run CPU:
The CPU affinity for Terrain Server process. If you want to use multiple CPUs, use comma separated values. Please note that if you use multiple CPUs here, you need to specify 'NumCalcThreads' in 'rFactorPro HD Terrain Server.ini' accordingly. For example, if 'NumCalcThreads=2', then you can specify CPUs to something like '4,5'. If not set, we use thedefault value set in rfProTSAPIInitialize.ini. See 'Configuration Files' section below.
- Terrain Server Surface Directory:
Absolute path of the directory where Terrain Server track data resides. By default this is /usr/local/ccursim/RFPRO-TerrainSrv if not provided.
- Terrain Server Axes :
The axes the track data uses; 0 (RFactor Axes), 1 (ISO Axes). By default the axes are set to ISO axes. The value you specify here will depend on how your track data is formatted.
- Track name :
The name of the track to load into the Terrain Server initially. No default is assumed for this parameter.
- Tyre[n] :
Define the radius and width of the each tire. Default is 0.3 for radius and 0.25 for width when not provided.
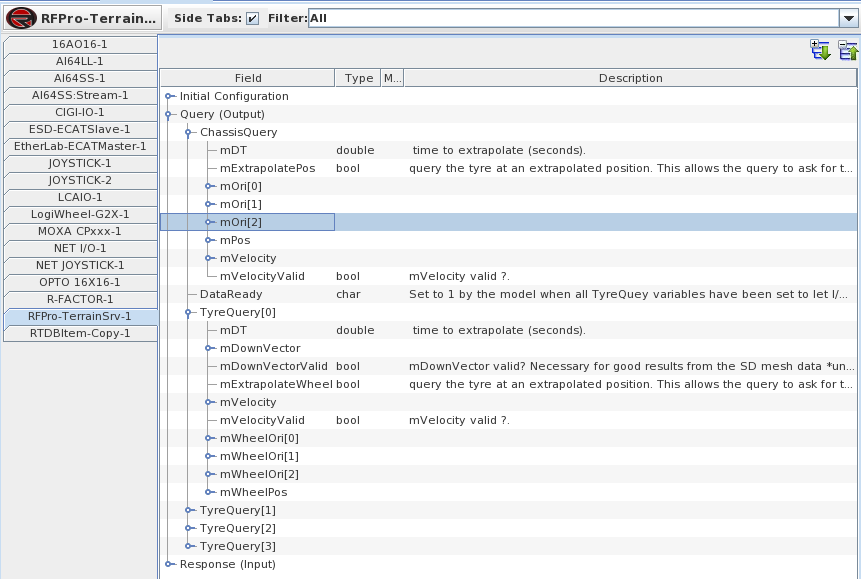
This section provides mapping of the parameters to issue a query to the Terrain Server.
At a minimum , WheelOri[0-2] for each tire need to be mapped to RTDB variables so that a valid query can be submitted to the Terrain Server.
- DataReady:
This is a handshake parameter between the output I/O task and the model. The I/O task will wait for this value to be != 0 before it sends the query data to the Terrain Server. It is the responsibility of the model that sets query values to set the value as early as possible during the model sub cycle so that the Terrain Server executable will have ample time to compute the result before the response is read in the next input cycle.
- TyreQuery[n]: n from 0 to 3
Define the values of the query parameters for each wheel (n [0-3]).
- mDT: The time delta to extrapolate the center position of the wheel to the next physics frame.
- mExtrapolateWheel: Whether the extrapolation should be performed.
- mDownVector: Unit vector (x,y,z) of 'down' (world coordinates). Typically should be set to conform to the chassis orientation
- mDownVectorValid: Whether the Down Vector should be used. Necessary for good results from the SD mesh data *unless* the wheel rotation about its axle has already been removed
- mVelocity: Linear velocity of wheel center (world coordinates).
- mVelocityValid: Whether the Velocity Vector should be used. Necessary for good results from the SD mesh data *unless* the wheel rotation about its axle has already been removed
- mWheelOri[m] m from 0 to 2 : Orientation of wheel (world coordinates). These values should provided at a minimum for a valid query to the Terrain Server.
- ChassisQuery
Define the values of the query parameters for the chassis.
- mDT: The time delta to extrapolate.
- mExtrapolatePos: Whether the extrapolation should be performed.
- mOri[m] m from 0 to 2 : Orientation of chassis (world coordinates). These values should provided at a minimum for a valid query to the Terrain Server.
- mVelocity: Linear velocity of chassis (world coordinates).
- mVelocityValid: Whether the Velocity Vector should be used.
- ChassisGroupQuery
Define the values of the query parameters for the chassis.
- mGroupID: The ID of the group to which this offset applies.
- mOffset: Offset in local chassis coordinates applied to each point in the group before querying.
- mOri[m] m from 0 to 2 : Orientation of group (local chassis coordinates).
This section provides the values to initialize the Terrain Server configuration. The initial values can be entered as constants in the mapped Points|Initial value column or will
be provided the RTDB item initial value when the parameter is mapped to an RTDB item. The RTDB item initial value is provided by the default value in the item configuration panel or by associated initial
condition value set specified when running the test.
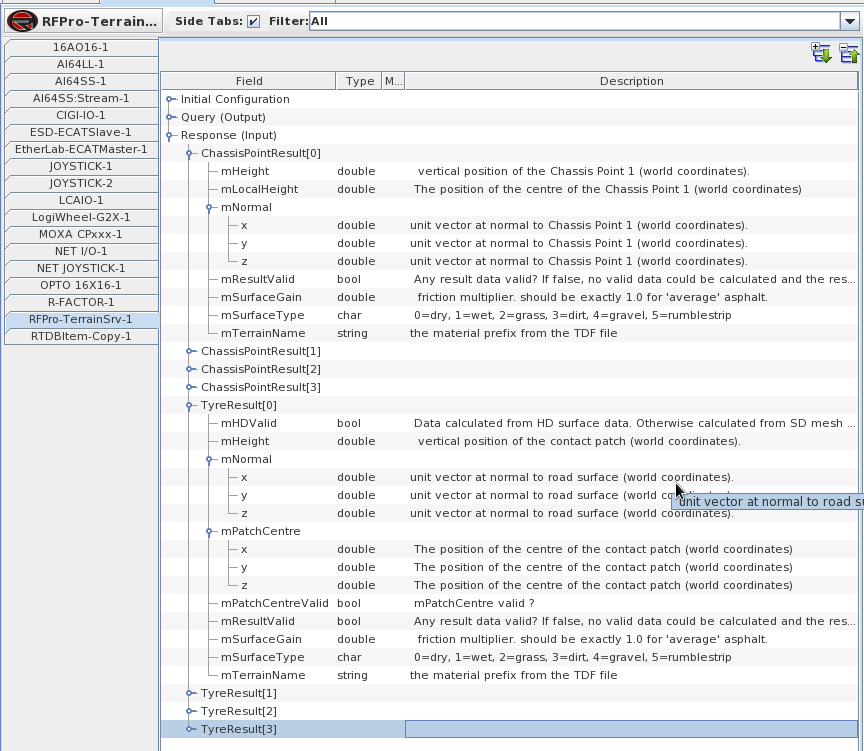
- TyreResult[n]: n from 0 to 3
Define the values of the response from the Terrain Server corresponding to the query issued during the previous output cycle.
- mResultValid: Any result data valid? If false, no valid data could be calculated and the result should be ignored. The I/O task will only update the RTDB variables when the result is valid.
- mHDValid: Data calculated from HD surface data. Otherwise calculated from SD mesh data.
- mHeight: Vertical position of the contact patch (world coordinates).
- mNormal: Unit vector (x,y,z) at normal to road surface (world coordinates).
- mPatchCentre: The position of the center of the contact patch (world coordinates)
- mPatchCentreValid: Whether mPatchCentre results are valid and should be used. The mPatchCentre mapped RTDB variables will only be updated when the result is valid.
- mSurfaceGain: Friction multiplier. should be exactly 1.0 for 'average' asphalt.
- mSurfaceType: 0=dry, 1=wet, 2=grass, 3=dirt, 4=gravel, 5=rumblestrip.
- mTerrainName: The material prefix from the TDF file.
- ChassisPointResult[n]: n from 0 to 3
Define the values of the chassis response from the Terrain Server corresponding to the query issued during the previous output cycle.
- mHeight: Vertical position of the chassis point (world coordinates).
- mLocalHeight: The position of the center of the chassis point(world coordinates).
- mNormal: Unit vector (x,y,z) at normal to chassis point (world coordinates).
- mResultValid: Any result data valid? If false, no valid data could be calculated and the result should be ignored. The I/O task will only update the RTDB variables when the result is valid.
- mSurfaceGain: Friction multiplier.
- mSurfaceType: 0=dry, 1=wet, 2=grass, 3=dirt, 4=gravel, 5=rumblestrip.
- mTerrainName: The material prefix from the TDF file.