SimWB supports the EtherCAT protocol both as master and slave. SimWB can be configured to act as a master to query EtherCAT remote I/O slave devices on the network. It can also be configured to act as a slave with a flexible I/O configuration. In this case it responds to the EtherCAT’s master queries to set and get RTDB variable values.
When running as a master, the master runs on a standard Ethernet interface whose driver is provided by the Linux kernel. In order to run the slave, you need a Koenig-PA EtherCAT slave PCI board, driver, and EtherCAT slave libraries. For more information, please refer to the Koenig-PA web site at http://koenig-pa.de.
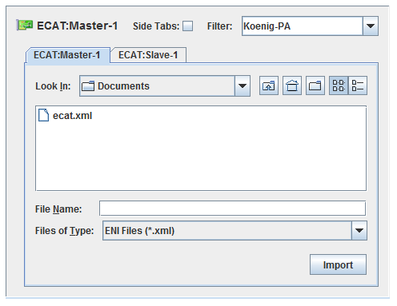
The SimWB EtherCAT master is generated by importing the ENI file that defines the EtherCAT network configuration. The ENI File serves two purposes:
via RIQ.
N/A.
ICS-SWB-1236.

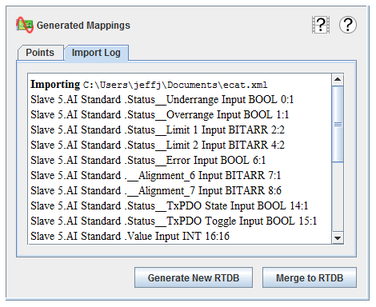
Imports the EtherCAT ENI file, populating the Points Tab on the right side of the I/O Mappings dialog. This does not actually modify the RTDB. See the Points Tab for doing that.
The <Name> tag within each <Variable> tag defines the name of the I/O point. Additional information, such as data type, bit size, and bit offset, is also used in the I/O point’s configuration.
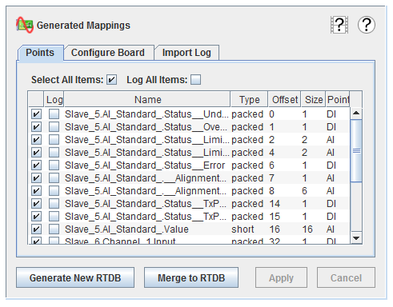
Selects all items in the table. Selection is done by checking the checkbox in the leftmost column.
Marks all items for being logged when added to the RTDB. Individual items are marked for logging by checking the checkbox in the second column from the left.
Marks an item as selected. This is the unlabeled, leftmost column.
Marks an item as logged when added tot he RTDB.
Name that the I/O point will be given.
Type of the I/O point.
Bit offset of the I/O point.
Bit size of the I/O point.
Kind of I/O point tht will be generated.
Digital input point.
Digital output point.
Analog input point.
Analog output point.
Generates a new real-time database containing the selected points, and uploads the ENI file to the database.
Adds the selected points to the currently edited RTDB, and uploads the ENI file to the database.

Commits all pending edits to the real-time host. See Apply .

Discards all pending edits. See Cancel.
 RTDB Name
RTDB NameName of the new RTDB
Resource group the new RTDB will belong to.
Description of the new RTDB.
Cancels creating a new RTDB.
Creates a new RTDB with the settings made above.
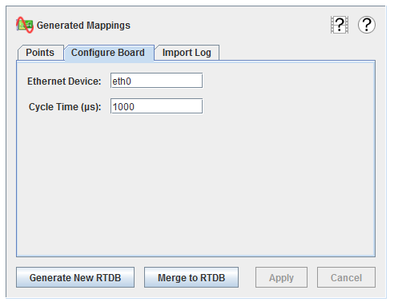
Name of the Linux Ethernet device that will be used to connect to the EtherCAT network. The Koenig-PA EtherCAT master libraries use the standard OS kernel driver to communicate over the EtherCAT network.
Before you start running the SimWB EtherCat master, you should make sure the Ethernet interface for the selected EtherCAT device is up. On the real-time host, enter the following command at a shall prompt:
# ifconfig device up
Cycle time at which the EtherCAT network is run, in microseconds.
Commits all pending edits to the real-time host. See Apply .
Discards all pending edits. See Cancel.

|
EB5100 FlexRay | ECAT:Slave |

|