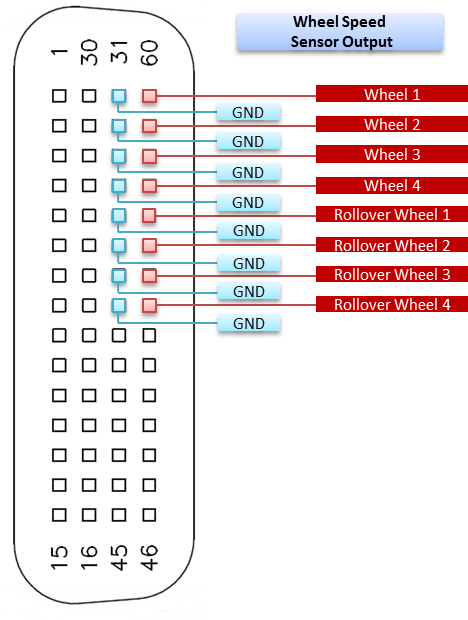
| Pin | Pin Name | Function | Pin | Pin Name | Function | Pin | Pin Name | Function | Pin | Pin Name | Function |
| 1 | NC | - | 16 | NC | - | 31 | GND | GND | 46 | NC | - |
| 2 | NC | - | 17 | NC | - | 32 | GND | GND | 47 | NC | - |
| 3 | NC | - | 18 | NC | - | 33 | GND | GND | 48 | NC | - |
| 4 | NC | - | 19 | NC | - | 34 | GND | GND | 49 | NC | - |
| 5 | NC | - | 20 | NC | - | 35 | GND | GND | 50 | NC | - |
| 6 | NC | - | 21 | NC | - | 36 | GND | GND | 51 | NC | - |
| 7 | NC | - | 22 | NC | - | 37 | GND | GND | 52 | NC | - |
| 8 | NC | - | 23 | NC | - | 38 | GND | GND | 53 | OUT7 | Rollover 4 |
| 9 | NC | - | 24 | NC | - | 39 | NC | - | 54 | OUT6 | Rollover 3 |
| 10 | NC | - | 25 | NC | - | 40 | NC | - | 55 | OUT5 | Rollover 2 |
| 11 | NC | - | 26 | NC | - | 41 | NC | - | 56 | OUT4 | Rollover 1 |
| 12 | NC | - | 27 | NC | - | 42 | NC | - | 57 | OUT3 | Wheel 4 |
| 13 | NC | - | 28 | NC | - | 43 | NC | - | 58 | OUT2 | Wheel 3 |
| 14 | NC | - | 29 | NC | - | 44 | NC | - | 59 | OUT1 | Wheel 2 |
| 15 | NC | - | 30 | NC | - | 45 | NC | - | 60 | OUT0 | Wheel 1 |
| NC - No connection |
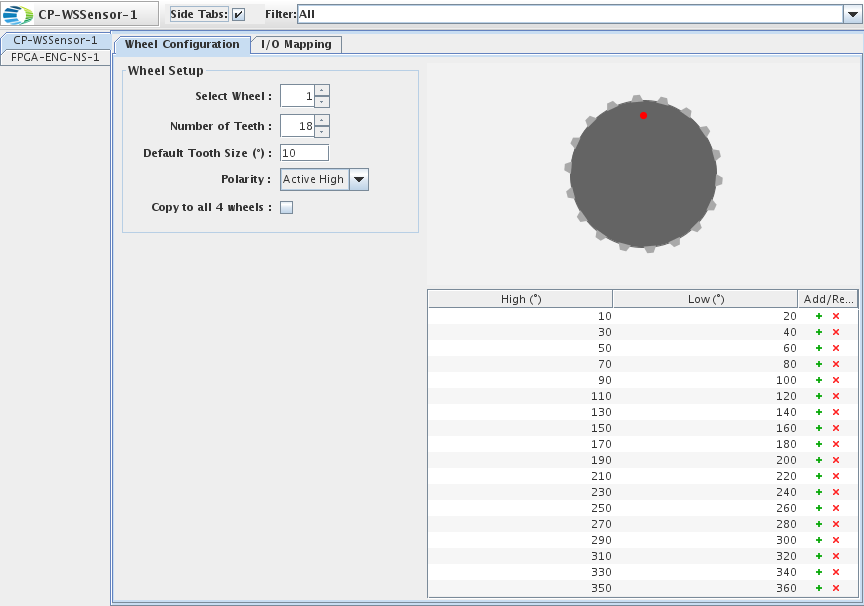
 and
and  buttons to
customize the wheel teeth. However, note that using these buttons results in values of the Number of Teeth
and Default Tooth Size fields being inapplicable.
buttons to
customize the wheel teeth. However, note that using these buttons results in values of the Number of Teeth
and Default Tooth Size fields being inapplicable.