 |
|
The TOOTH_WHEEL block provides the ability to output an aribitary pulse pattern driven by an RPM input. This IP Core provides functionalities such as:
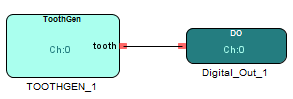
Figure below shows an example usage of the TOOTH_WHEEL IP core block as a wheel speed sensor simulator. A Simulink/Custom C model sends the RPM value to the IP core and the waveforms is generated for the set tooth profile.
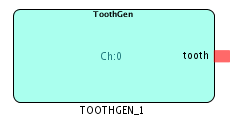
The digital output from the TOOTH_WHEEL block is connected to digital output block.
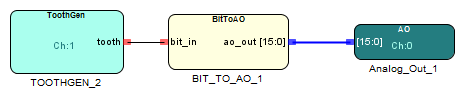
The digital output from the TOOTH_WHEEL block is connected to the analog output block via the BIT_TO_AO block. The BIT_TO_AO block will convert the digital input coming in to an analog output value.